
今回はかなりマニアックな釣り記事。 こんな方にオススメの記事です。
- 魚群探知機をレンタルボートで使用されている方
- サイドスキャンに興味がある方
なお、専門用語多めです。
最近の魚群探知機
近年では 魚群探知機の性能向上が凄まじく、逆に最新技術についていくのが大変なくらいです。
特に数年前まではハイエンドしか搭載されていなかったサイドスキャンは、今や多くの魚探に搭載されるようになっています。サイドスキャンを使用している方は「振動子ポール」を使用してる方が多いのではないでしょうか?


※魚探ポール色々。この棒の先端に魚群探知機の振動子を取り付けます。
モチベーション
以前、振動子ポールを自作したのですが、どうもイマイチ。振動子ポールは水中に入れてエレキで移動すると水の抵抗を受け固定がズレてしまいます。 RAMのタフクロー(ボール直径1インチ)の固定力が足りませんでした。
少し値段は上がりますが、ボール直径1.5インチのタフクローを購入された方が無難です。
買ってしまったもんは仕方ない。タフクローはそのままにして、他を改良してなんとかしてみようと考えました。
そこで、今回は 水の流れを再現できるシミュレーションソフト(OpenFoam)を使用して、抵抗の少ない振動子ポールの形状を探してみようと思います。
振動子ポール形状
振動子ポールの断面形状は30mm角、直径30mmおよび流線形に注目します。なお、GarminのGT52HW(EchoMAP Plus 95SVで使用)を参考に振動子形状を作成しました。
改良した順番は、30mm角⇒30mm円柱⇒流線形です。
角柱のモデル
円柱のモデル
流線形のモデル
シミュレーション結果:角柱のモデル
各振動子ポールのシミュレーション結果を示していきます。 色の差は流れの速度差を表しています。なお、左から右に5㎞/h(エレキの高速移動時を想定)の速度で水を流しています。
角柱30mmの結果
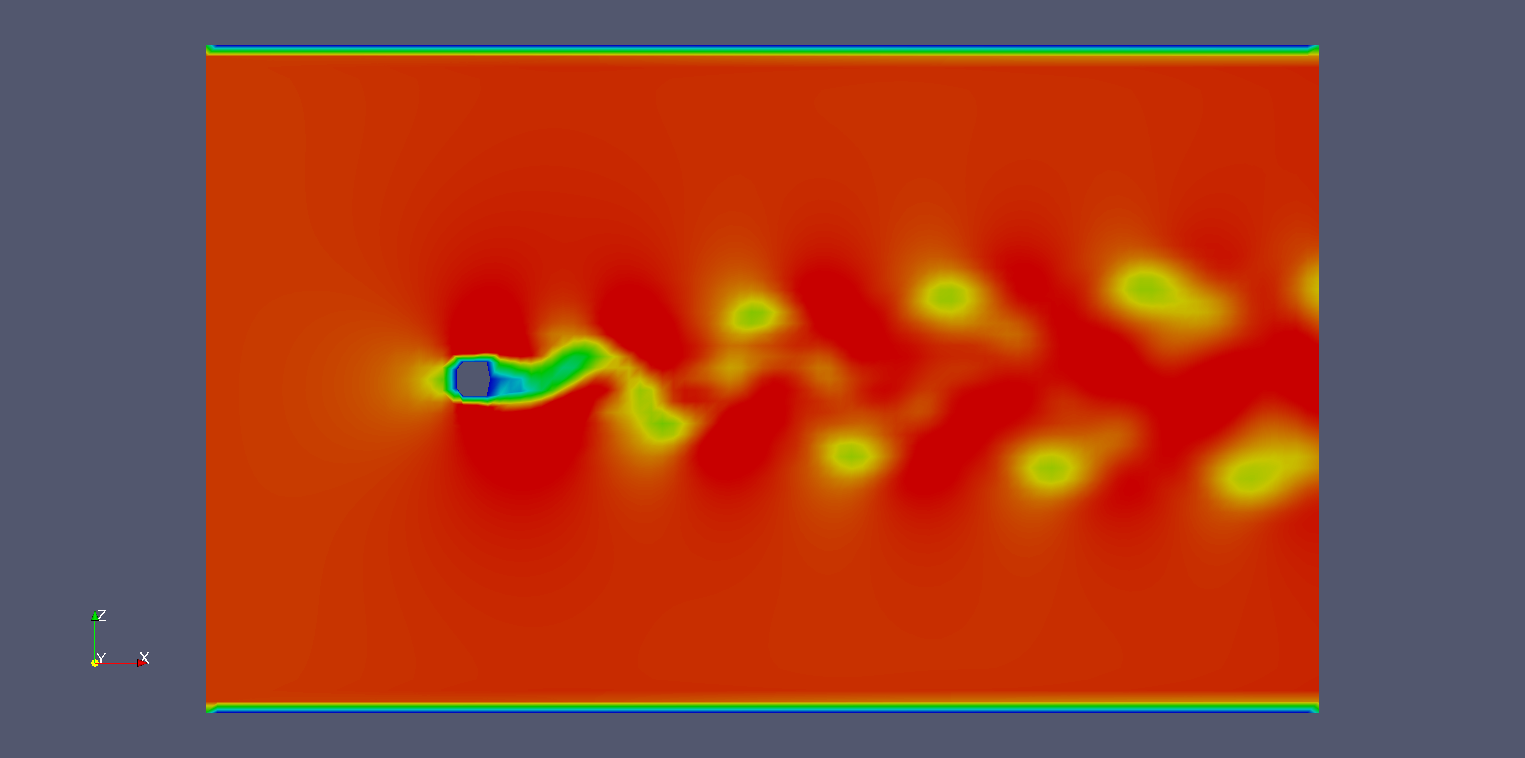
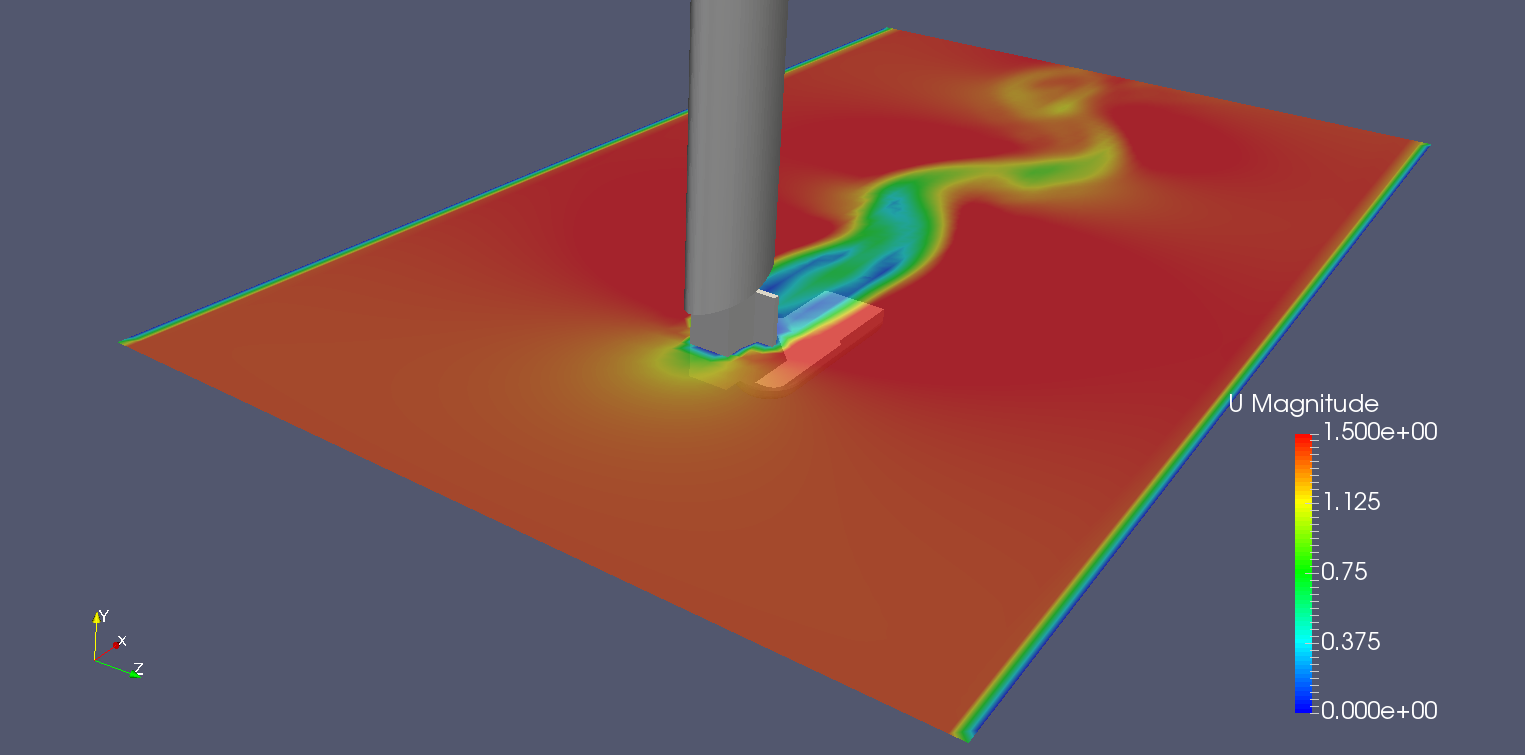
上から見た結果
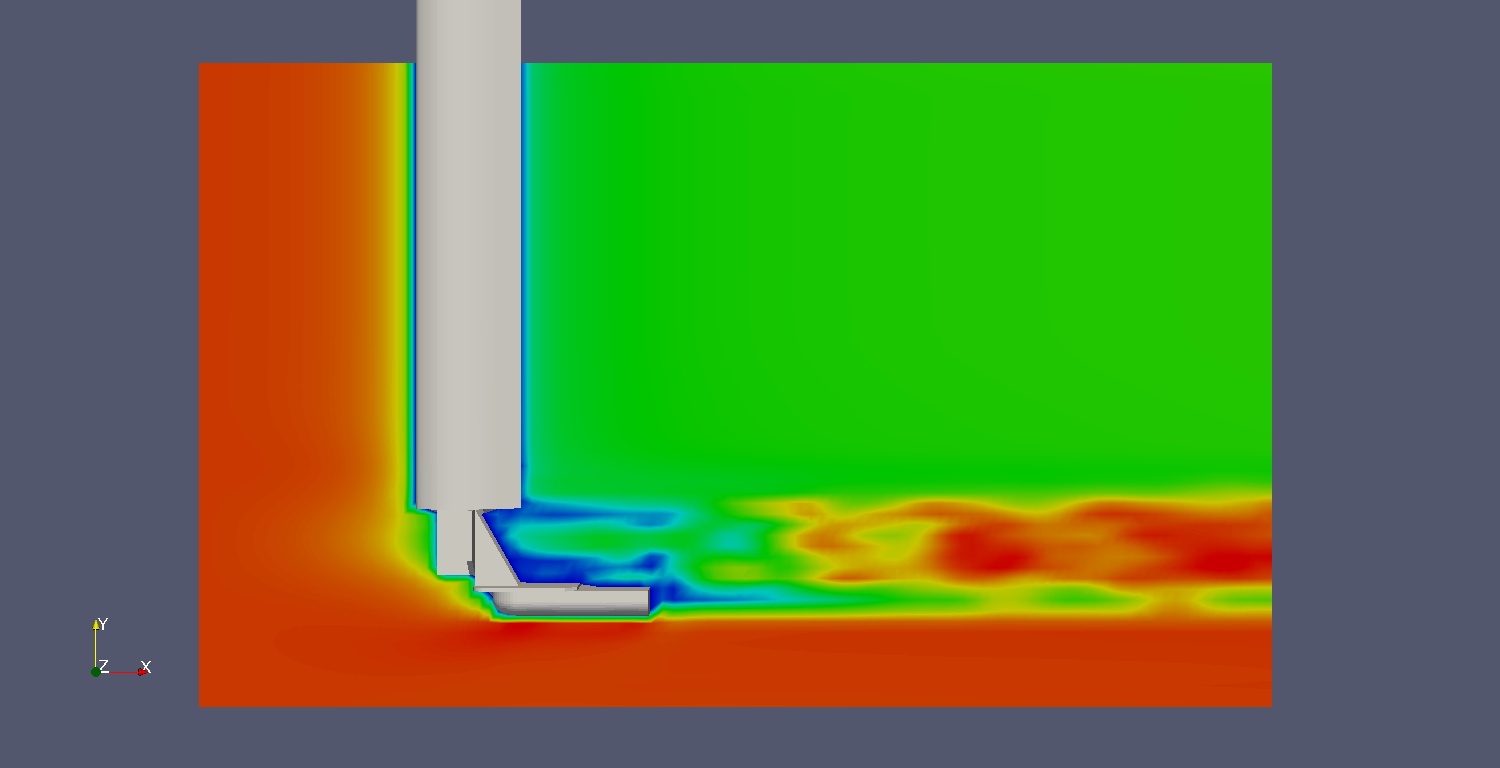
横から見た動画
振動子ポールの後方に乱れた流れ(乱流)が発生していることがわかりました。ここから、静止画でじっくり結果を見ていきます。
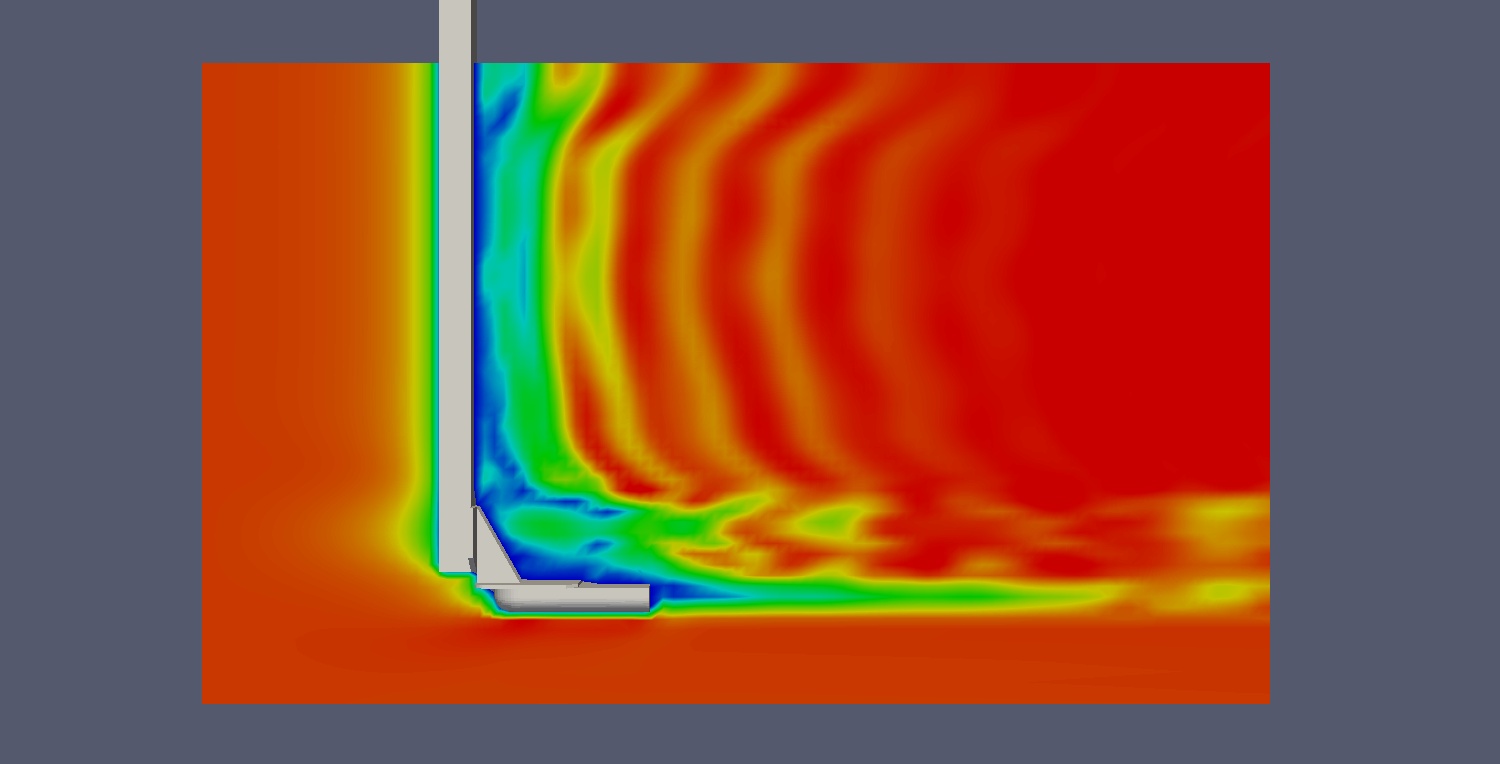
振動子およびそのマウント付近の流れに大きな乱れが発生していることがわかります。 また30mm角柱の後方には縞状の模様がでていますが、これは下に示すような規則的な渦(カルマン渦)が発生したことで観察されたものです。
次に円柱30mmの結果を示します。
シミュレーション結果:円柱のモデル
横から見た動画
上から見た動画
角柱30mm同様、振動子ポールの後方に乱れた流れ(乱流)が発生していることがわかりました。
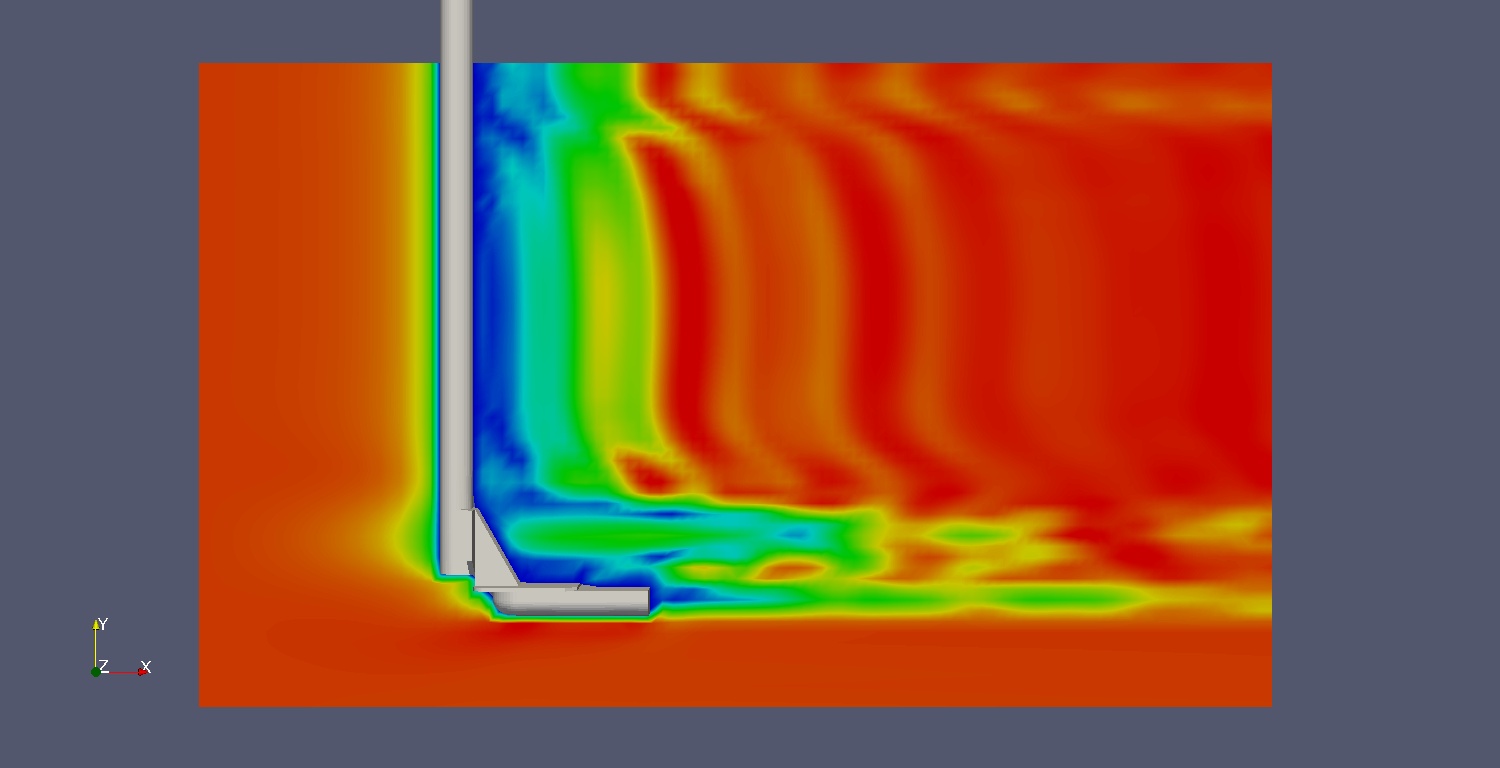
横からみた流れの様子
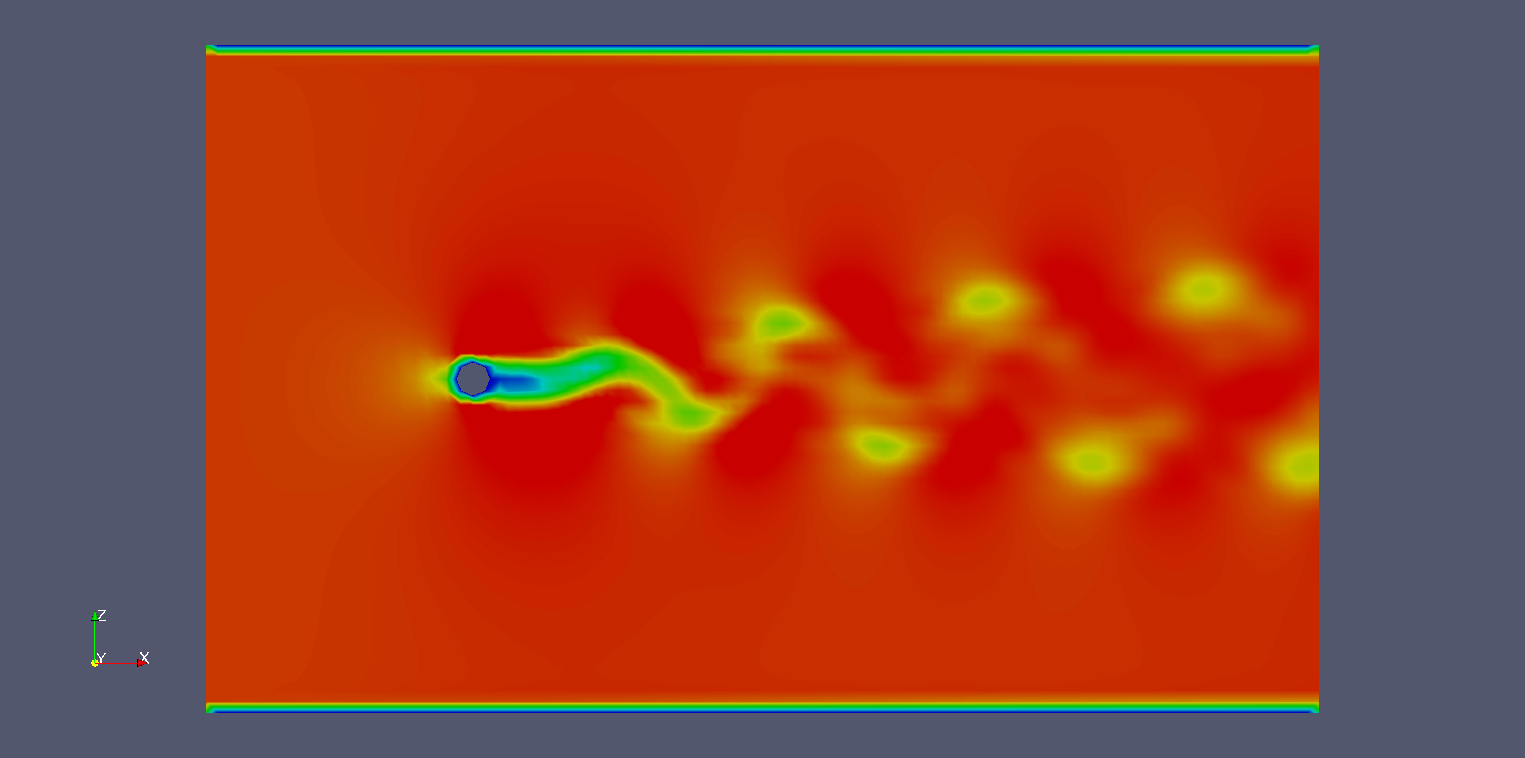
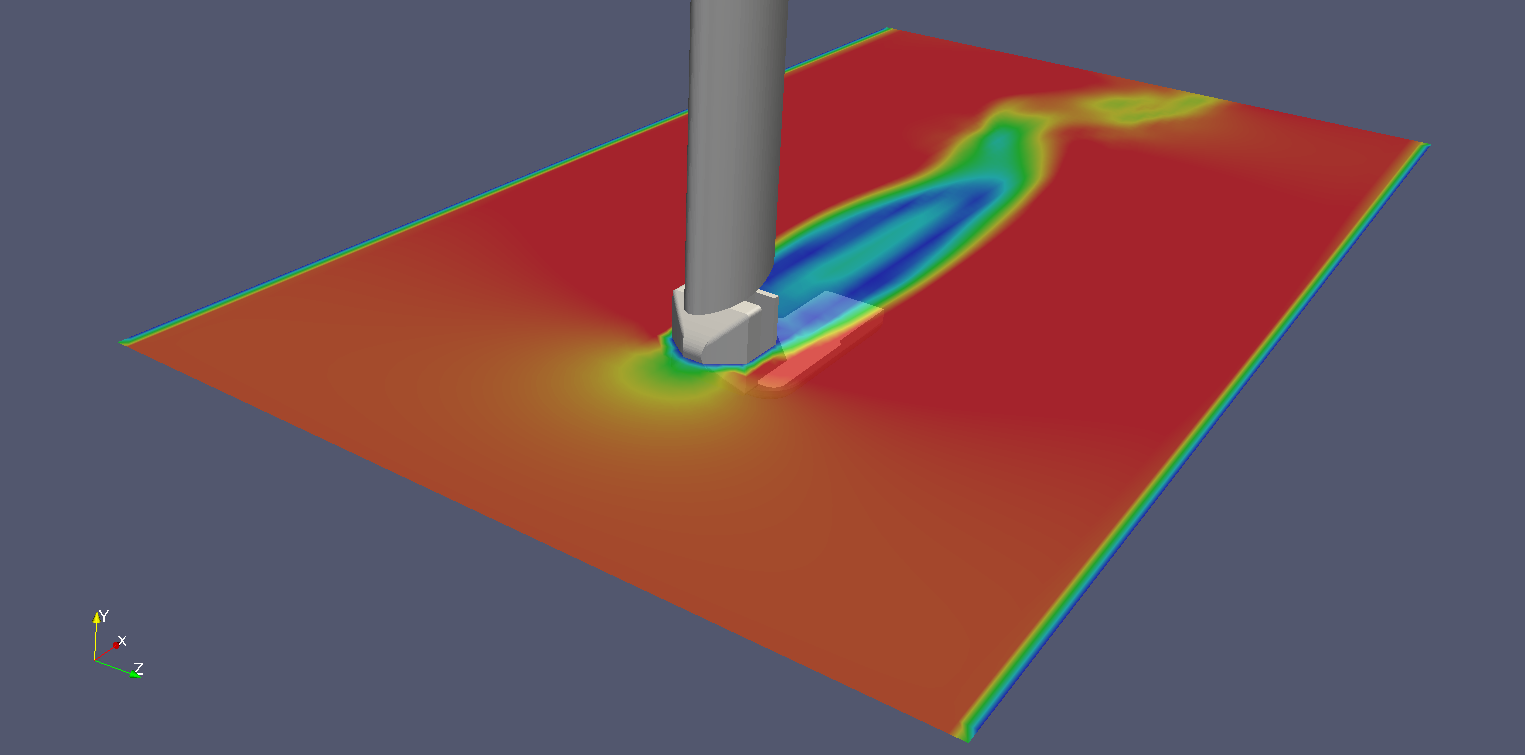
上からみた流れの様子
円柱30mmの結果は角柱30mmとほぼ同じ結果となりました。やはり、振動子ポール後方には乱流が発生しました。
5㎞/hで移動すると振動子ポール後方に乱流が発生することがわかりました。 この乱流は振動子ポールが水から受ける抵抗が大きいことを意味ししており、この乱流をできだけ抑えることが理想的なはず。
乱流が起きにくい形状は流線形であることは明らかであるので、その形状でどれくらい流れが変化するか確認してみました。
シミュレーション結果:流線形のモデル
横から見た流れの様子
上から見た流れの様子
角柱&円柱に比べ、明らかに流れ方が変化しました。 特に流線形の後方にはカルマン渦は確認されませんでした。同様に静止画の結果を確認してみます。
横から見た流れ
流線形後方には乱流は見られないのでバッチリです。 しかし、振動子とそのマウント後方には相変わらず乱流が発生しています。この部分は特に変更を加えておらず、3条件で変化しないはずで妥当な結果です。
振動子とそのマウント付近は上の図に示すように抵抗を受けやすいようです。.
この部分が抵抗を受けるのはまずいです。 なぜかというと、固定点から遠い位置で力を受けると振動子ポールが回転しようとします。 RAMマウントはその固定部にボールが使用しているので、回転には弱いです。
この乱流も何とかしたいのでもう少し形状を検討してみることにしました。
すこし改良してみた
変更したのは振動子固定部付近です。まず変更前はこんな形状でした。

平坦な面が水を受けてしまい、抵抗が大きくなっていると考えました。
そこで以下のようなカバーを作成してみました。

では、その結果です。まず横から見た流れの様子。 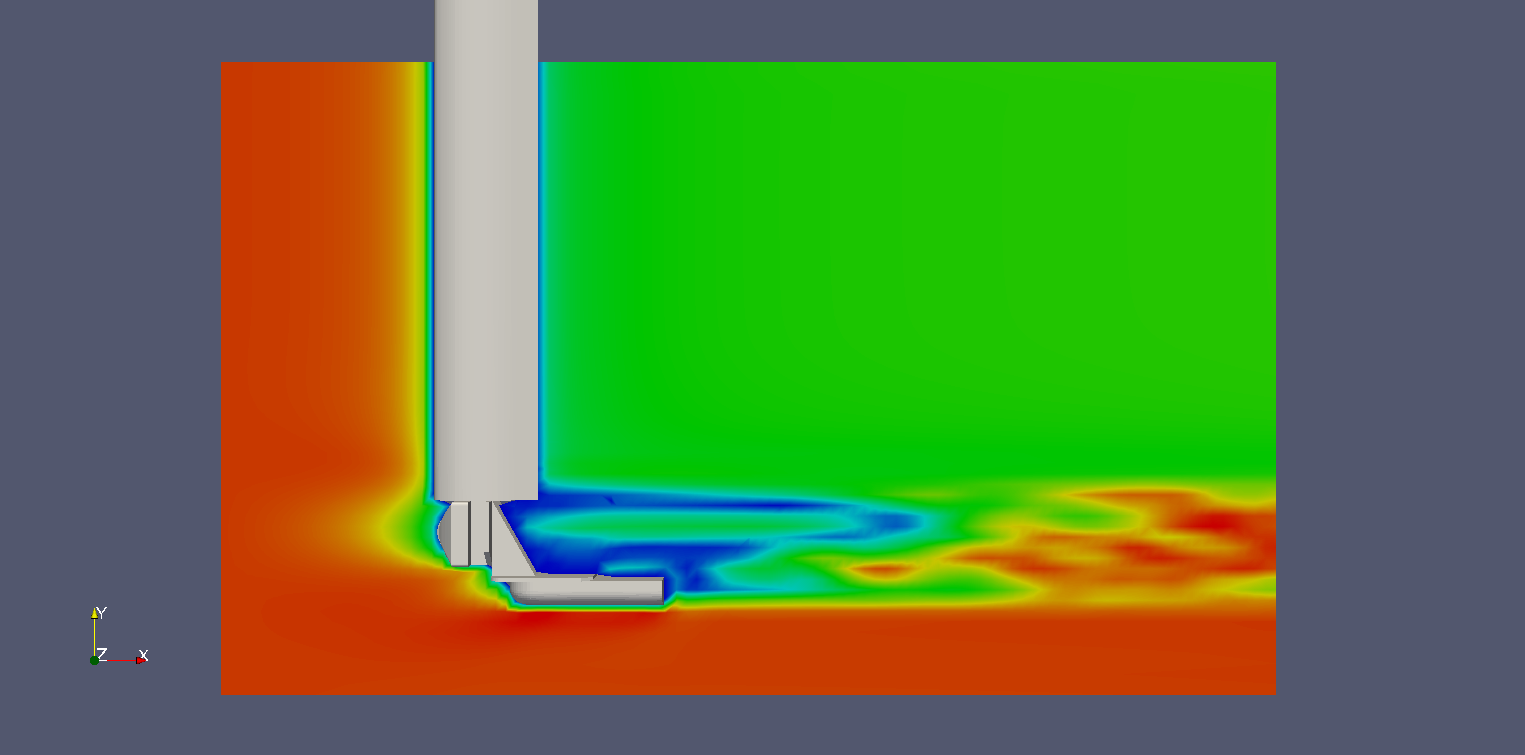
変更前後であまり大きく変化していないように見えますが、一応、変更部の流れに注目してみます。
変更前
変更後
ちょっとよくなったようにも見えますが・・・なんかイマイチですね。
マウント前方カバーだけでなく、後方にも何かしら追加する必要があります。 これは今後の課題としたいと思います。
おまけ:実際に作成した振動子ポール
一応、自作振動子ポールはも載せておきます。お粗末ですが・・・。

全体像、流線形状については現在研究中。

改良で追加したカバーも一応つけてます。後方にも何か追加予定です。
編集後記 久々にOpenFOAMつかったのですごく疲れました。
以上
コメント
[…] ← 前へ […]